In this lecture, I want to talk about the Möbius strip and its cousins, the non-orientable 2D spaces. (And I want to talk about what “orientable” means.)
I’ve talked with you in class about some of these things; I want to back that up here, and to provide some more details. Then I want to go a bit further. The relevant text for this is The Shape of Space, Chapter 4.
The Möbius Strip
Let’s recall the Möbius strip. There are two different spaces I have been talking about, and I’ve been calling them both the “Möbius strip”, so let me set the record straight here.
Actually, while I’m at it, I’ve been calling two different spaces the “cylinder”, so let me come clean there as well.
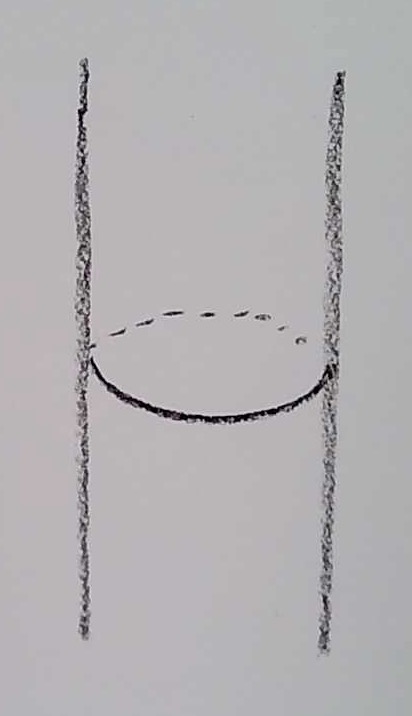
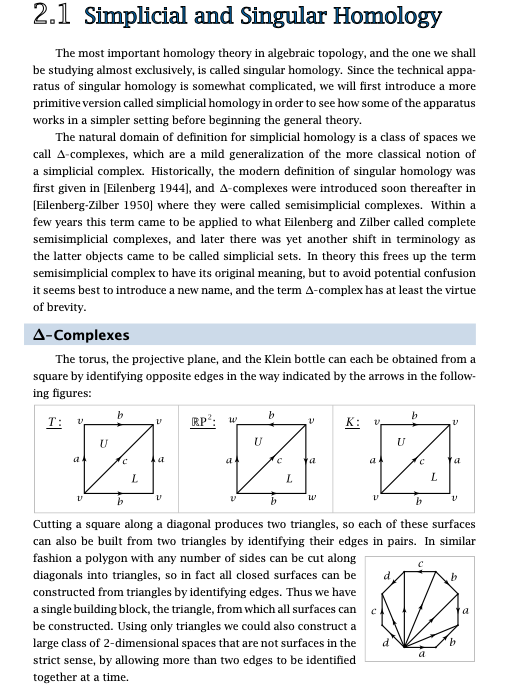
On the one hand, I can start with an infinite strip in the 2D Euclidean plane, bounded by two parallel lines on its sides, and I can “glue” the left side to the right side:
The infinite 2D cylinder, intrinsically.
This can be embedded in 3D, as the surface of an infinitely long, straight, circular tube:
The infinite 2D cylinder, embedded in 3 dimensions.
I will call that one the “infinite cylinder”.
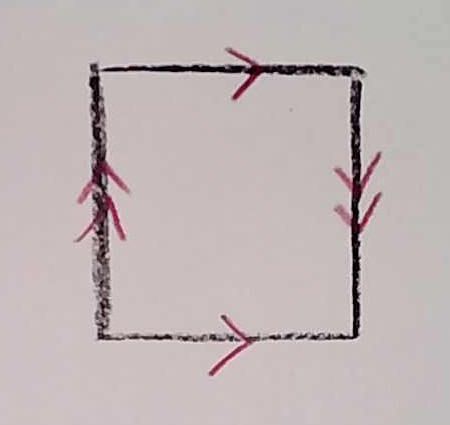
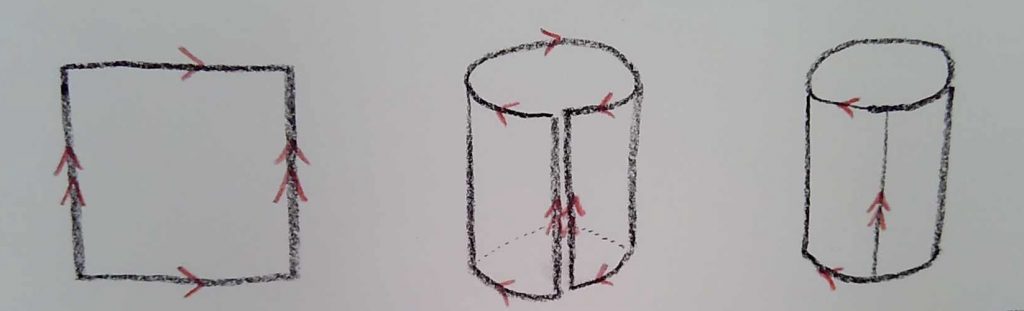
On the other hand, I could start with a rectangle, and glue together two of the sides, keeping the orientation straight:
The finite 2D cylinder, intrinsically.
This one I’ll call the “finite cylinder”. It also has a uniform locally Euclidean geometry, but it is finite in extent, and it has a boundary, consisting of the top and bottom edges. A 2D inhabitant of this universe can “fall off the world”.
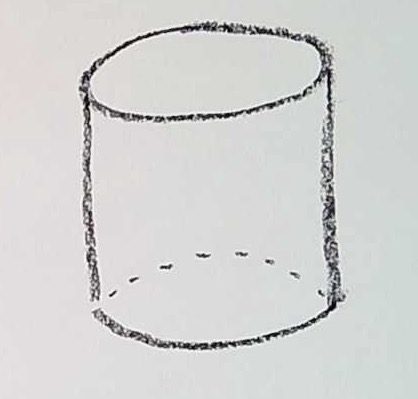
I can embed this in 3D in the most straightforward way, as the side surface of a 3D, straight, circular cylinder:
The finite 2D cylinder, embedded in three dimensions.
In this picture, I am assuming that the surface is a hollow tube; I am NOT capping it off with a top and bottom. (If I did do that, I would get a different space; let’s call it the “closed finite cylinder”. How does that space sit in the classification of the last lecture? What is geometry like in that universe?)
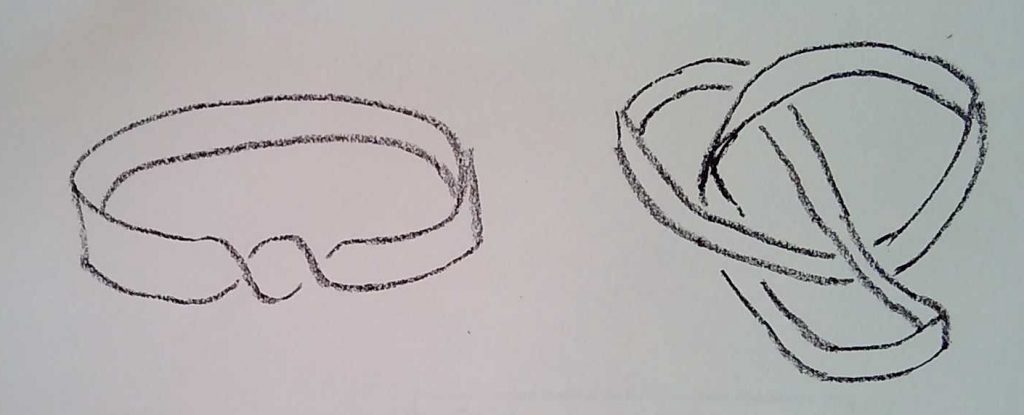
There are other ways to embed the flat 2D cylinder into 3 dimensions:
Other embeddings of the 2D flat cylinder into 3 dimensions.
It took me a few tries to get that second picture right! (At least, I think it’s right now. You should check my work!)
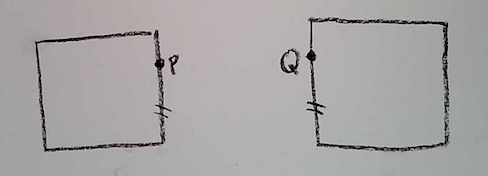
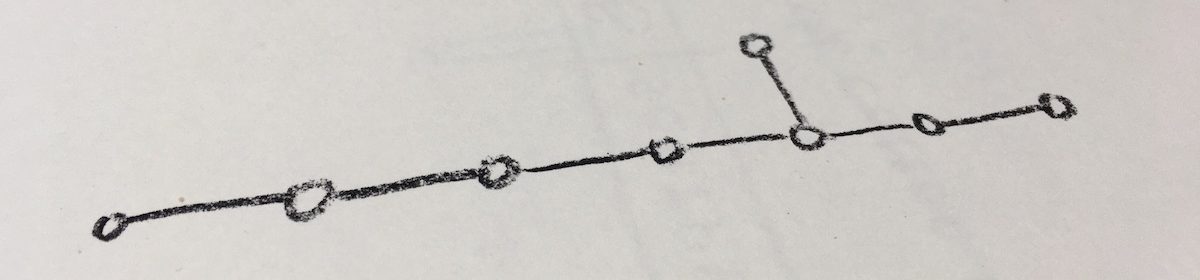
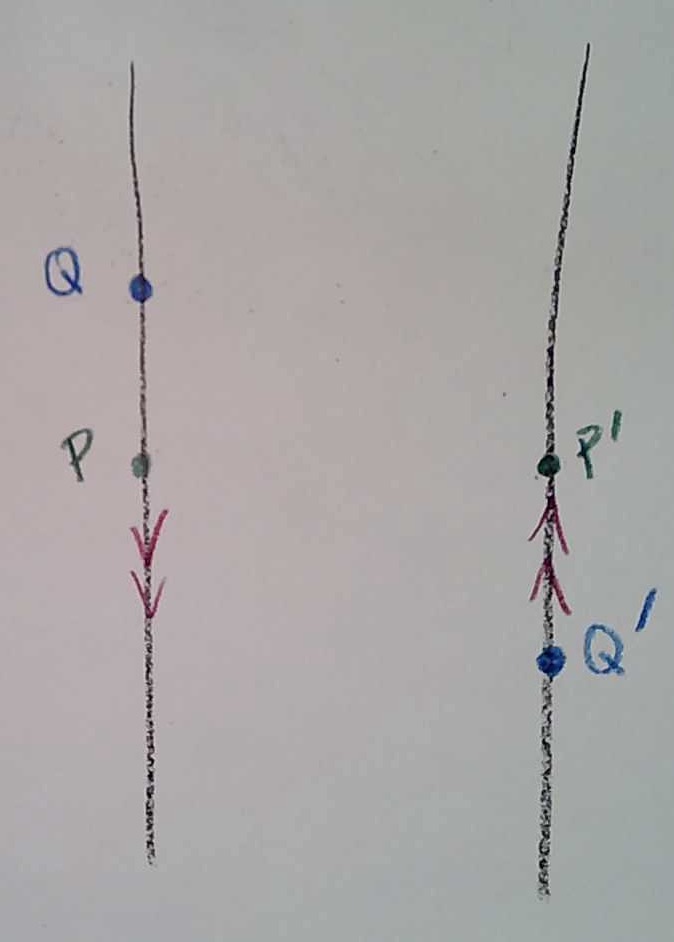
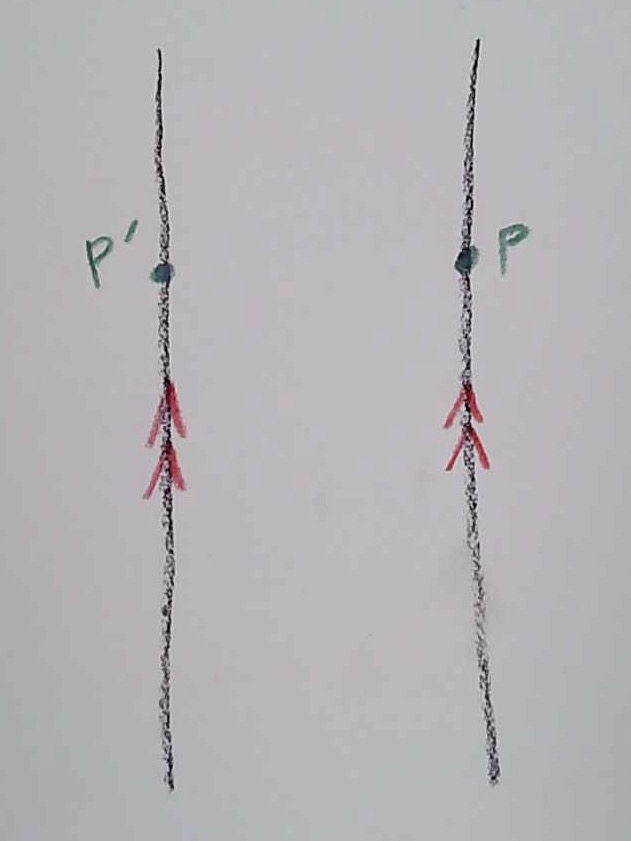
OK, so back to Möbius strips! There will be two versions, the infinite Möbius strip, and the finite Möbius strip. I am going to glue the sides with a reversal of orientation. For the infinite Möbius strip, I will have to pick a center line of this reflection, say PP’, where P and P’ are points on the left and right edge respectively, at the same height. Any point Q on the left side above P will be identified with a point Q’ at the same distance below P’ on the right side:
The infinite 2D Möbius strip, intrinsically. Point P is identified with point P’; the center line is PP’. The point Q is identified with Q’, where the length of PQ equals the length of P’Q’.
I can’t embed this infinite Möbius strip in 3 dimensions, without having it self-intersect. (That can be proved, but it isn’t easy!)
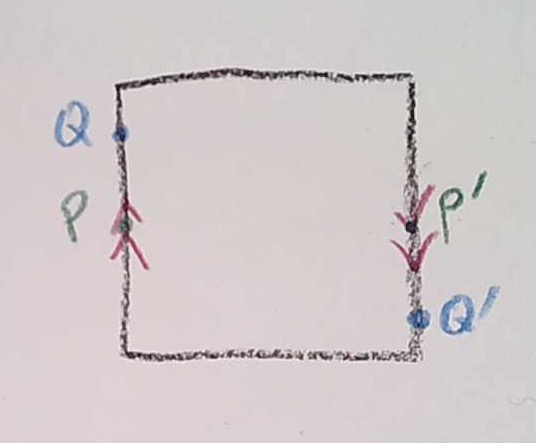
For the finite Möbius strip, since the left and right edges are finite line segments, reversing the orientation makes the center line the middle of those line segments:
The finite 2D Möbius strip, intrinsically.
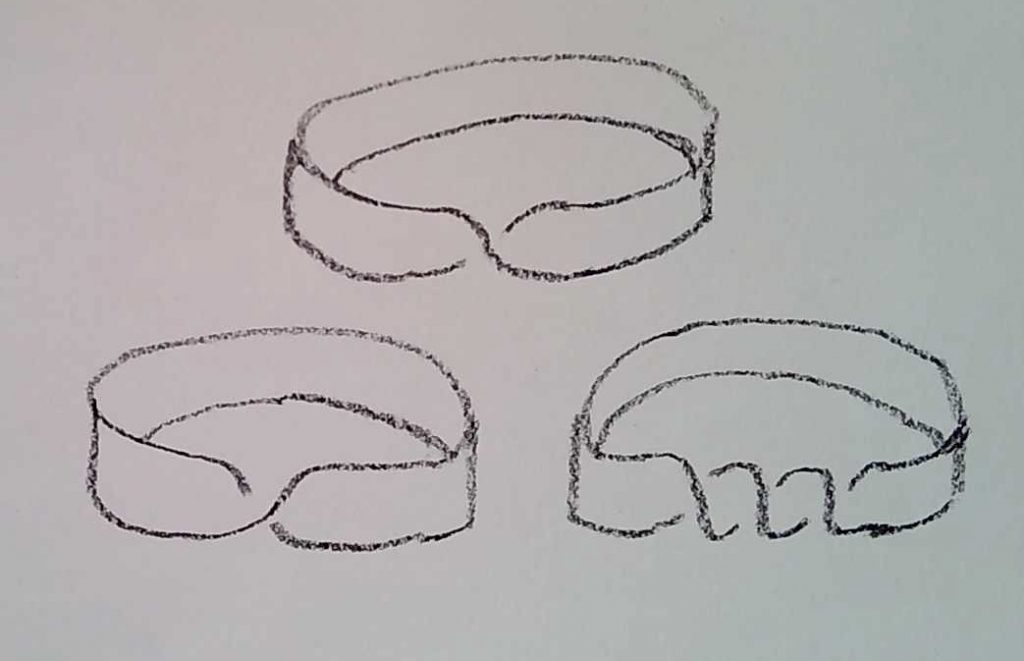
The finite Möbius strip, in contrast, can be embedded in 3 dimensions, in a number of ways:
The finite 2D Möbius strip, embedded in three dimensions.
Problem 1: a) Where do these two types of Möbius strips fit in the classification of Lecture 4? b) Describe the boundary of the finite Möbius strip. (Careful, this is a trick question!) c) In the picture I drew earlier, where I embedded the 2D cylinder in three dimensions as a knotted strip: how could I change this to make it into an embedding of the 2D Möbius strip?
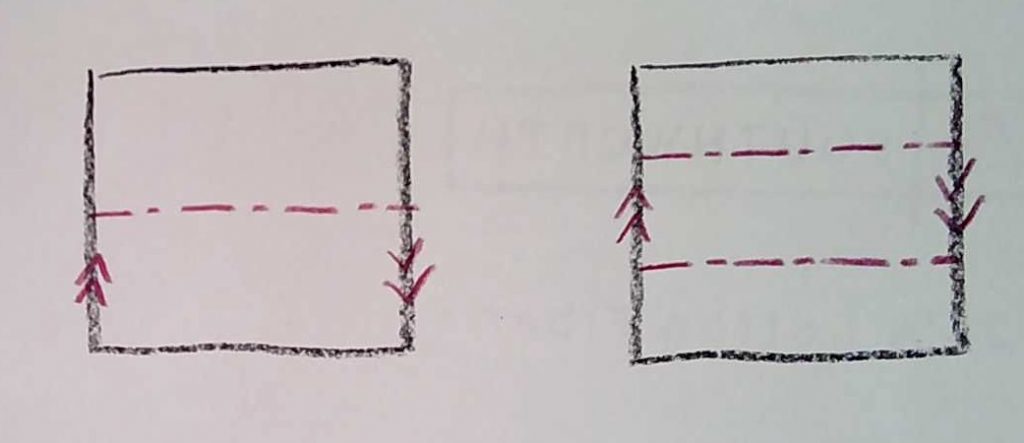
Problem 2: In class, I made a Möbius strip out of paper (that is, a 2D finite Möbius strip, embedded in three dimensions in the most straightforward way). Then I cut it down the center. For another experiment, I cut it on two lines, 1/3 and 2/3 the way up the strip.
Cutting Möbius strips. I made mine much longer and skinnier, so that I could twist them around to embed them in three dimensions.
Experiment! Do it physically, with paper and tape and scissors. Try more possibilities with the cutting line. What can happen? Can you find a pattern? If you can find one, can you explain it? The result has multiple features (number of pieces, how each is twisted, how they are linked). Can you explain the pattern in each of these features? Can you generalize further to other possibilities? (For example, what if I start with a cylinder with a double (360 degree) twist in three dimensions, and do the same thing?) (Hint: At least for understanding the pieces intrinsically, you could try starting with the 2D picture of the strip with the gluing rules, and cut and paste that 2D picture (re-labeling the gluing rules as needed).)
The Klein Bottle
If we start with the finite Möbius strip, we can then choose to glue together the top and bottom:
The 2D Klein bottle, intrinsically.
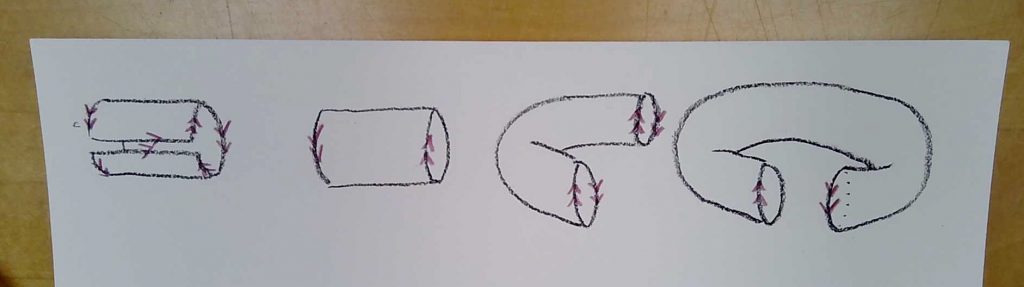
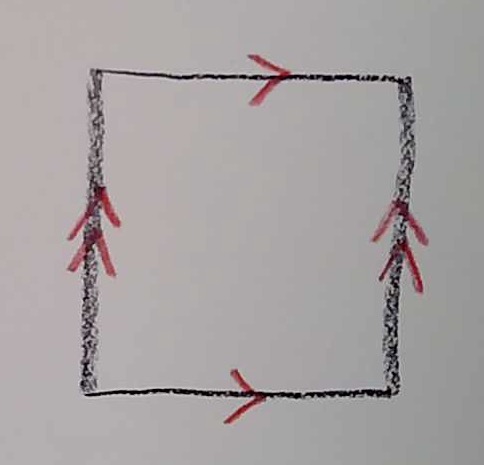
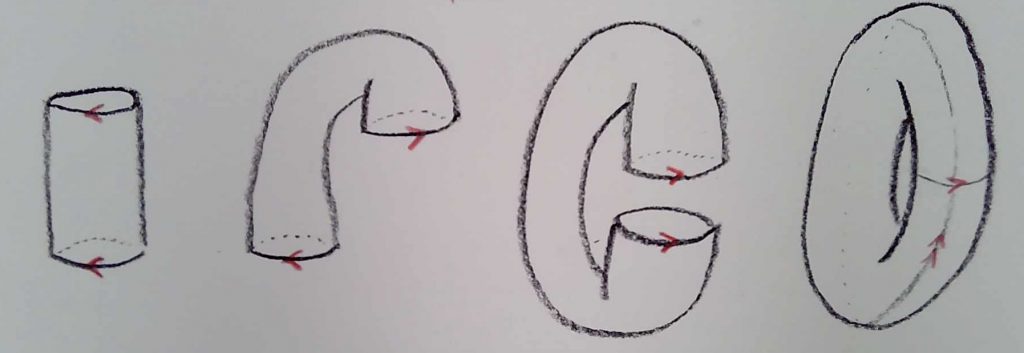
We cannot embed the Klein bottle in three dimensions. Not without intersections, anyway. If we try, we can see how close we can get, and why it seems not to be able to work. Start by gluing together the two edges with matching orientations, to make a cylinder. Then, try to stretch around the edges to glue together the end circles, as we did for the torus:
First steps in trying (ultimately unsuccessfully) to embed the Klein bottle in three dimensions.
The arrows are pointing the wrong way! For the torus, I could have just glued them together straight. Now, I have to turn one of the arms around to make the orientations match.
And that’s where we encounter our problem: to then glue them, I need to get at the other circle from inside the tube. The only way is to cut a slice into the one arm, so I can pass the other arm through:
After doing this violence to the tube, now I can line up the arrows correctly and sew the two circles together.
I have a tough time drawing the final result, so I’ll refer you to the book for that picture. We can sort of think of this as an embedding, if we make the rule that 2D creatures do not see the slice cut in the arm; they just pass across it without noticing. (The two edges of the slice are abstractly “glued”.)
Incidentally, I’ve been talking throughout of a mental image of surfaces being “paper”, and joining edges being “gluing”. But when we are stretching and cutting as we are, it might be better to imagine the surfaces as some sort of fabric: maybe knitted sweater material, or T-shirt fabric, and to imagine joining as sewing. (Of course, these are all mental images to help us think about the idealized mathematical surfaces, which have no thickness at all.)
Problem 3: Where does the Klein bottle fit in our classification from the last lecture?
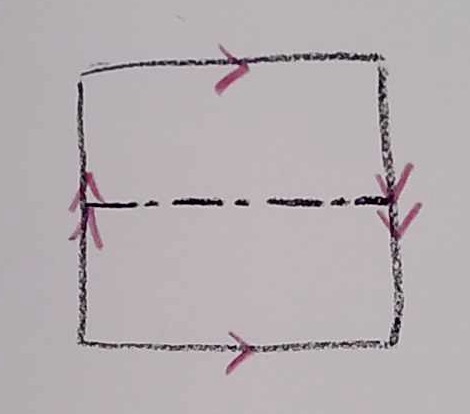
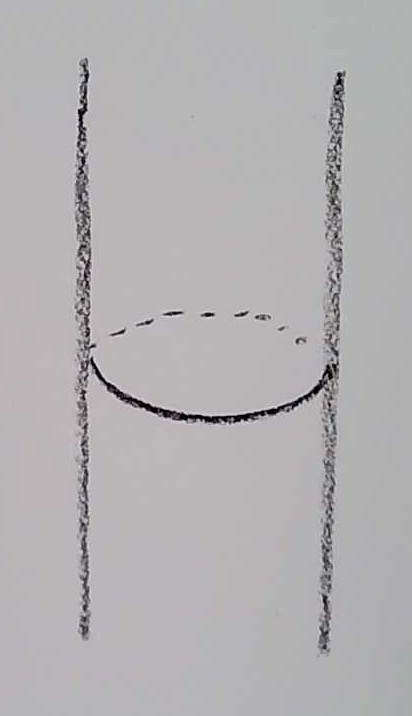
Problem 4: (This might be a longer “research” type question.) I’d like to try cutting the Klein bottle down the middle with scissors, like we did for Möbius strips! There is a slight difficulty: to do it with paper and scissors, we’d have to work in four dimensions. But we can still perform the cutting with the abstract, intrinsic diagram of the Klein bottle. The interlinking or embedding of the pieces doesn’t make much sense anymore, but we can still figure out what each piece is intrinsically. a) Cut the Klein bottle down the middle with scissors:
Cut on the dotted line!
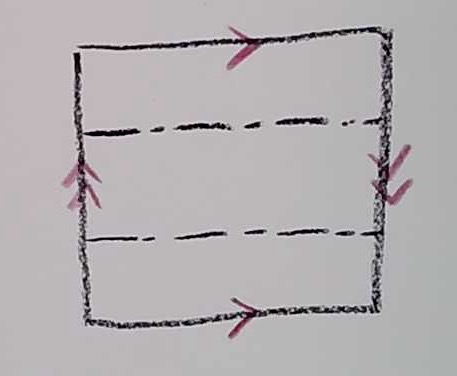
The result will be two surfaces (or maybe one surface) with a boundary (the edge created by the cut). What are(is) those(that) surface(s)? b) Now try cutting on a line 1/3 of the way up and 2/3 of the way up.
Cut on both dotted lines!
How many surfaces? What are they? c) Continue with this process. Can you determine a rule or pattern? d) I guess I should have started doing this with the torus, which presumably would have been easier. Try cutting the torus (abstractly) in the same way. What surfaces result in each case? What is the pattern?
Problem 5: (This might also be a longer “research” type question. I’d like everyone to at least try to get started on it, but you can consider going into more depth as being optional.) In an earlier problem, you analyzed the possibilities for a straight line (geodesic) on the flat 2D torus (assuming a square shape). We got a fairly detailed answer: if the slope is a rational number, then the numerator and denominator determine how many times the straight line wraps around in the two directions before closing in on itself (closed geodesic). If the slope is an irrational number, the straight line never meets itself, and continues forever.
I’d like you to try to do a similar analysis of the straight lines (geodesics) on the flat 2D Klein bottle. Start by drawing some simple closed straight lines, to see if it is even possible. Build up some examples by experiment. Then, try to work toward a more systematic answer.
Other Possibilities??
Starting with a flat 2D square, we have glued the sides in different ways to produce a cylinder, a Möbius strip, a torus, and a Klein bottle. Are there other ways to glue the sides of a square that we haven’t tried? If there are, do these even make sense as surfaces? If so, what do they look like?
Problem 6: Try to answer the questions above. First, try to enumerate all the fundamentally different ways we could identify edges of a 2D square. (You’ll have to decide what “fundamentally different” ought to mean.) Then, for each possibility, go through the analysis we have done above for the cylinder, Möbius strip, torus, and Klein bottle: figure out if you can embed it in three dimensions (maybe with some cheating). Figure out what the geometry and topology is: is it flat? Does it have a boundary? Classify it according to the previous lecture. Maybe some options just reproduce what we’ve done before; if so, explain why. Maybe some options just don’t make sense as surfaces; if so, explain why.
The End of This Lecture…
Well, that was fun!
Drawing math pictures!
Next time, I’d like to do more cutting and pasting: punching holes in surfaces, sewing them together. I’m also heading towards doing 3D spaces, analogously to how we’ve been doing 2D spaces. And I want to get back to geometry and curvature, and how that is related to the topology of a space. I’d encourage you to keep thinking of questions and imagining other possibilities as we move forward!
OK, before we go much further, let’s have a brief recap of where we have come so far. (That doesn’t make this a review, though: as I summarize, I’m going to add new categories and terminology.)
We started with doing geometry on the sphere:
A sphere.
We have spent quite a long time on this, actually. It is an important example.
We’ve discussed this, but let me emphasize again: we are considering the sphere as a 2 dimensional space. If we imagine the sphere as the surface of the Earth, for example, it really is only the surface: we are not allowed to travel into the air or below the earth. It is also a mathematical idealization: it is perfectly smooth, perfectly uniform, and has zero thickness. A 2D creature living in the spherical universe has only two independent degrees of freedom: for example, latitude and longitude.
(And one more thing, which didn’t come up before: if we imagine the sphere as a balloon, I am making no distinction between the inner surface of the balloon and the outer surface, because the balloon has no thickness. I am not thinking of the surface as having two sides; a 2D creature occupies the whole thickness of the surface (which is zero). Maybe a transparent sphere might be a better way to picture this.)
The sphere:
Has a non-Euclidean geometry. For example, there are triangles whose interior angle sums add to more than 180 degrees. The circumference of a circle is less than .
Has a uniform geometry. There is no way for a 2D creature to tell if it is at the North Pole, or the South Pole, or the Equator, or anywhere in between. In Shape of Space, Weeks calls this a homogeneous geometry. (See p.41 of Weeks.)
Has positive curvature. I haven’t said this word yet. I’ll be more precise about it soon, but the intuitive idea is that there is “less space” in space than in Euclidean space. Triangles bow outwards, so have internal angle sums bigger than 180 degrees. If we try to draw parallel lines, they get closer to each other as you travel along them, and they eventually meet. The circumference of a circle is smaller than . (Said differently, the circumference of a circle grows less than linearly with its radius.) Traveling around a path, you can turn less than 360 degrees and end up pointing the same way you started.
Is closed. I haven’t used this word yet either. It means two things: 1) the sphere has no boundary, no edge points; and 2) the sphere is a bounded space, not infinite (the technical word for this is compact, and the exact definition is kind of tricky). See Weeks, pp.42–44.
Just for completeness, let me compare this to the regular old Euclidean plane:
The Euclidean plane?
Oh dear. This is quite difficult to draw. I put edges on it, but that would be a rectangle. I am trying to imagine an infinite, perfectly flat plane, which has no thickness: it is perfectly 2 dimensional. As with the sphere, there is no bottom or top of this sheet of paper, because it has no thickness. Any point or line (of zero thickness) takes up the whole thickness of the plane (also zero thickness). Two dimensional beings who live in the Euclidean plane have only two degrees of freedom, for example, North-South and East-West (or if you prefer, left-right and up-down).
The Euclidean plane:
Has a Euclidean geometry. This means the ordinary rules of geometry that you may have learned before apply. In particular, the internal angles of a triangle always add to 180 degrees, and the circumference of a circle is exactly .
Has a uniform, or homogeneous, geometry. There is no way for a 2D creature to tell if it is at the place you have picked as an origin, or one hundred miles to the North, South, East, West, or anywhere else.
Has zero curvature. Euclidean space is the reference point for curvature. Triangles are straight in the ordinary sense, and Euclid’s proofs are valid, so triangles have internal angle sums exactly equal to 180 degrees. Given a line, and a point on the line, there is exactly one parallel line to the first line, passing through the given point. The circumference of a circle is exactly equal to . (Said differently, the circumference of a circle grows exactly linearly with its radius.) Traveling around a path, you must turn exactly 360 degrees in order to end up pointing the same way you started. We will often use the word flat as a synonym for zero curvature.
Is open. The Euclidean plane is non-compact: it is infinite in extent. It has no boundary: there is no “edge” to the space.
The next thing we looked at was the cube:
The cube.
The cube. Good ol’ reliable cube.
As before, I am only considering the outer surface of the cube, and considering it to be of idealized zero thickness, so this is also a 2D universe. Two-dimensional creatures living within this space have just two degrees of freedom.
The cube:
Has a non-Euclidean geometry. For example, there are triangles whose interior angle sums add to more than 180 degrees. The circumference of a circle can be less than . However, it does have Euclidean geometry in some regions. Geometry becomes non-Euclidean if the region you are concerned with contains one or more vertices of the cube.
Has a non-uniform, or non-homogeneous, geometry. A 2D being could locate the exact position of each vertex: triangles which don’t contain the vertex have internal angle sums of 180 degrees, and triangles which do contain it have sums of 270 degrees: a sudden and dramatic difference. (Also, if the 2D beings have sight, then they are going to see some very funny things near the vertex. I encourage you to think about this; we’ll talk about it soon.)
Has positive curvature in some places, and zero curvature in others. Triangles, circles, and closed paths which contain one or more vertices behave much like they do on the sphere. Triangles, circles, and closed paths which do not contain any vertex behave exactly as they do in Euclidean space.
Is singular, or non-smooth. I haven’t used this word yet. The sphere has its curvature smoothly distributed. The curvature of the cube is infinitely compressed into eight discrete points of zero size. Consequently, the sphere is called a smooth space, and the cube is called a singular, or non-smooth space. (For those of you have taken calculus: another word for non-smooth is non-differentiable; the exact definition of smooth involves differentiability.)
Is closed. It is compact, and has no boundary.
Is geometrically distinct from, but topologically equivalent to, the sphere. If we ignore geometry, and just pay attention to how things are glued together, the cube is the same as the sphere. In other words, we could continuously deform a sphere to make a cube. As topological spaces, the cube and the sphere are the same. But as geometrical spaces, they are quite different.
Something similar goes for all the other polyhedra we have looked at so far. The only difference is how their curvature has been concentrated: how much curvature per point, and how many points.
Next on our menu is the flat 2D cylinder:
The flat cylinder.
What I am trying to draw here is two parallel straight lines in the Euclidean plane. The points of the “flat cylinder” consist of any points in between those two parallel lines, or lying on the lines. There is an additional rule, that we are “gluing” the two parallel lines. This means that a point P on one line is considered to be the same point as a point P’ on the other line at the same height.
P and P’ are the SAME point on the flat cylinder.
A 2D creature that leaves out the right line, comes back through the left line, without noticing anything has happened.
The 2D flat cylinder:
Has an everywherelocally Euclidean geometry. I haven’t used the word “locally” yet: it means in a small enough neighborhood. This means the ordinary rules of geometry that you may have learned before apply, as long as things don’t wrap all the way around the cylinder. In particular, the internal angles of a triangle always add to 180 degrees, and the circumference of a circle is exactly , provided that the “hole” of the cylinder is not contained in their interiors.
Has a uniform, or homogeneous, geometry. There is no way for a 2D creature to tell if it is at the middle of the strip, or the edge, or if it is moved up or down along the strip.
Has zero curvature. Curvature is a local property. (It is a tricky question of whether I should consider the infinite end, or “hole”, of the cylinder as representing curvature. On the one hand, a triangle containing the “hole” of the cylinder in its interior—that is, one which has an edge that wraps around the cylinder—has an interior angle sum of 540 degrees. On the other hand, the cylinder is not “curved” anywhere. We’ll think about this more later, but for the moment I’ll just say that the cylinder has zero curvature.)
Is open. It is non-compact: it is infinite in extent. It has no boundary: there is no “edge” to the space.
Now, we could also imagine the cylinder as being rolled up in three dimensions. That is, we could say “cylinder version two” is created by taking the surface of an infinitely long tube in three dimensions:
Cylinder version two.
It’s a bit tricky to draw: because it goes on forever in the up-down direction, I don’t want to put ends on my drawing.
I’m going to assume that I have made the circumference of “cylinder version 2” equal to the width of the strip in my first version, the flat cylinder.
Then, as we have discussed, “cylinder version 2” is geometrically equivalent to the flat cylinder in the first version. Another word for this is to say that the two spaces are isometric (“iso” means “same”, “metric” means measure (like in “geometric”)). Two-dimensional beings could never know if they live in cylinder version 1 or cylinder version 2 (unless they somehow gained the power to access the unimaginable third dimension).
Cylinder version 2 is called an embedding of cylinder version 1 into three dimensions. The spaces are said to be the same intrinsically, that is, as viewed by 2D beings living inside them.
Next on our menu is the flat 2D torus:
The flat 2D torus.
The points of this space are any points in the square I have drawn, including on the edges. We are “gluing” the left and right sides, as we did for the cylinder; we are now also “gluing” the bottom and the top sides.
The flat torus:
Has an everywherelocally Euclidean geometry. The internal angles of a triangle always add to 180 degrees, and the circumference of a circle is exactly , provided that nothing is wrapping all the way around the torus.
Has a uniform, or homogeneous, geometry. There is no way for a 2D creature to tell if it is at the middle of the strip, or the left or right edge, or at the top or bottom. (This isn’t obvious; I’ll ask you about this in an exercise.)
Has zero curvature. Curvature is a local property. (Again, there is a tricky question of how to best think about triangles, or circles, or paths which wrap around the torus in some way. But for the moment I will just worry about local curvature, and the local curvature of the flat torus is always flat.)
Is closed. It is compact: it is finite in extent. It has no boundary: there is no “edge” to the space.
One more example, before I ask you some questions. The flat torus is given by an abstract “gluing” rule. If we try, in three dimensions, to actually physically glue up the edges of the flat torus as prescribed, the first step goes fine, just as it does for the cylinder:
The first step in gluing up the sides of a flat torus in three dimensions
The first, second, and third diagram here are all isometric spaces. I have done no stretching, and certainly no breaking. Pasting the two edges at the last step was just making pairs of points P and P’, which I was supposed to identify anyway, into one point. No problem so far. But now I am supposed to glue together the top and bottom. If you try to do this with paper, you run into trouble. It requires stretching:
Stretching the torus, to glue together the top and bottom.
Topologically, this is fine. I have kept the space the same topologically: I have deformed continuously, and not cut or broken anything. But I have changed things geometrically when I stretched.
Let me say that again another way: let’s call the right most diagram in my last picture “torus version 2”. This is the surface of a “donut” shape in three dimensions. From its nature as a surface in three dimensions, I could measure distances on the surface, I could define straight lines (paths of least distance), I could draw triangles etc, all as I did for the sphere. This “torus version 2” has its own geometry, as a surface embedded in three dimensions.
Then “torus version 1” (the flat torus) and “torus version 2” are topologically equivalent, but not geometrically equivalent. In other words, “torus version 2” is a correct topological embedding of the flat torus into three dimensions, but it is not a correct geometrical embedding of the flat torus into three dimensions (it is not an isometric embedding).
OK, before we go further, let me ask you some questions!
Problem 1: Let’s enumerate some of the possibilities:
Flat
Homogeneous
Smooth
Compact
Has No Boundary
Yes
No
Note that there are potentially 2 x 2 x 2 x 2 x 2 = 32 possibilities here. (I listed “has no boundary” with the odd double-negative, because the “nicer” option is “yes”, there is no boundary. So checking “no” in that column means it has a boundary.) a) For each of the spaces we have discussed, quickly check off the appropriate yes and no in this table, to check your understanding. (You can just do this mentally.) b) For every combination of properties that hasn’t already been appeared in the examples we discussed, either make up an example of a space with those properties, or try to explain why that combination is impossible.
Problem 2: I asked this question already on the Slack, but I’ll put it here for reference. Suppose we have a 1 x 1 square, with the edges glued to make a flat torus. Let’s start a line at point A, traveling up and to the right. I want to figure out what the entire infinite line A will look like. (It may not be exactly “infinite”, if it comes back to its starting point.) a) Suppose the line has slope 2/3. That is, suppose it goes up from point A at (0,0) to meet the point (1,2/3) on the right edge. Figure out what it does after that. Does it meet its starting point? If so, how many times does it go around the torus left to right, and how many times does it go around top to bottom? (You might want to try this using the trick of multiple copies of the square, as I showed in class.) b) Same question, but with the line having slope 3/4. c) Same questions, but with the line having slope 7/5. d) For what slopes will the line come back and meet its starting point? (This is called a closed line, or a closed geodesic.) Are there any slopes for which the line does not come back and meet its starting point? See if you can explain exactly why, in both cases. (I mostly answered this in class, but you should write down the answer in any case to see if you understand it completely; or if you didn’t follow what I said in class, you can try again to figure it out.)
OK, let’s start with the written lectures again! I’m going to try to keep this up for the rest of the term, if I can.
I would like to start these lectures beginning with our “reset” the other day. I’m planning to begin with topology with the cylinder and the flat torus (which we’ve talked about some already in class), and to go forward from there. But before I get to that, I’d like to zoom out a bit and look at where we are going.
Talking to you all in feedback meetings this week, it became clear to me that this would be a good moment to talk about the bigger picture again, before getting back into details. In particular, Sky articulated her questions in a very precise way, that made me see what I wasn’t communicating. I think several of you were having the same thoughts, but I wasn’t quite hearing it.
So, in this lecture, I want to talk about three things: 1) what I’m expecting you to do in this class; 2) what this class is about; and 3) what is math anyway? I’m going to take them in reverse order.
What is math?
I think that one puzzlement, lurking in the back of some of your minds, is this: when do we get to the real math? Where are the numbers, the equations, the fancy l0oking symbols? It was maybe a little clearer with the trigonometry and the Heavenly Mathematics text, where things looked a little more familiar. But in spherical geometry, and now topology, what is the point of all the pictures? Where is it going? When do the numbers and formulas arrive?
There is another question I think some of you have, which is actually closely connected to the first one: why all the writing? Why am I pushing you to write in a math class?
While it is true that a certain amount of math involves numbers and equations, there is a great deal of it that does not; or, at least, that is not the main point of it. The main point, in most advanced mathematics, is using logical argument, to understand the nature of the things you are studying. In this class, we are trying to understand the properties of shapes in various spaces (I’m using Sky’s wording here).
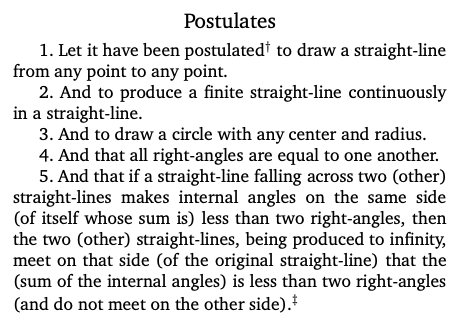
I almost said “the main point in most modern math” above. But in fact, in most of the earliest complete mathematical text we have, Euclid’s Elements, there are no numbers at all. Even angles are not measured (though the Greeks did use degrees as we do): Euclid says, for example, that the interior angles of a triangle add up to “two right angles”. (Euclid does have a couple of chapters on numbers, but he mostly banishes them from his treatment of geometry.)
One central idea of the Elements is to start with some very basic assumptions about the nature of space—axioms or postulates—and to logically explain the observed nature of shapes in space, starting from those very basic assumptions.
For example, the Egyptians were well familiar with Pythagoras’ theorem ( for the sides of a right triangle), more than a thousand years before Pythagoras; but we don’t have any record from them of why it is true. This is an empirical property of physical lines in space; Euclid shows that, based on a few fundamental assumptions, that it is a logical necessity. (Incidentally, Euclid manages to say Pythagoras’ theorem without numbers or measurement too!)
What does math look like?
Since Euclid is trying to make logical arguments about the nature of shapes in space, the Elements consists of diagrams, and prose arguments about those diagrams. Here is Euclid’s proof that the internal angles of a triangle add up to two right angles. (I am not expecting you to read this! But you can if you like!)
Euclid’s Elements of Geometry (The Greek text of J.L. Heiberg (1883–1885), Euclidis Elementa, edidit et Latine interpretatus est I.L. Heiberg, in aedibus B.G. Teubneri, 1883–1885, edited, and provided with a modern English translation, by Richard Fitzpatrick, copyright 2008. Link here to free pdf of whole thing!
Note that it is a prose argument!
Note also that Euclid refers to previous things he has established; each assumption he makes, he justifies based on simpler assumptions, back all the way down to his fundamental postulates. The whole of Euclid reads as an interconnected story, where he assembles small pieces out of the most simple elements, then assembles larger and larger pieces out of the smaller ones.
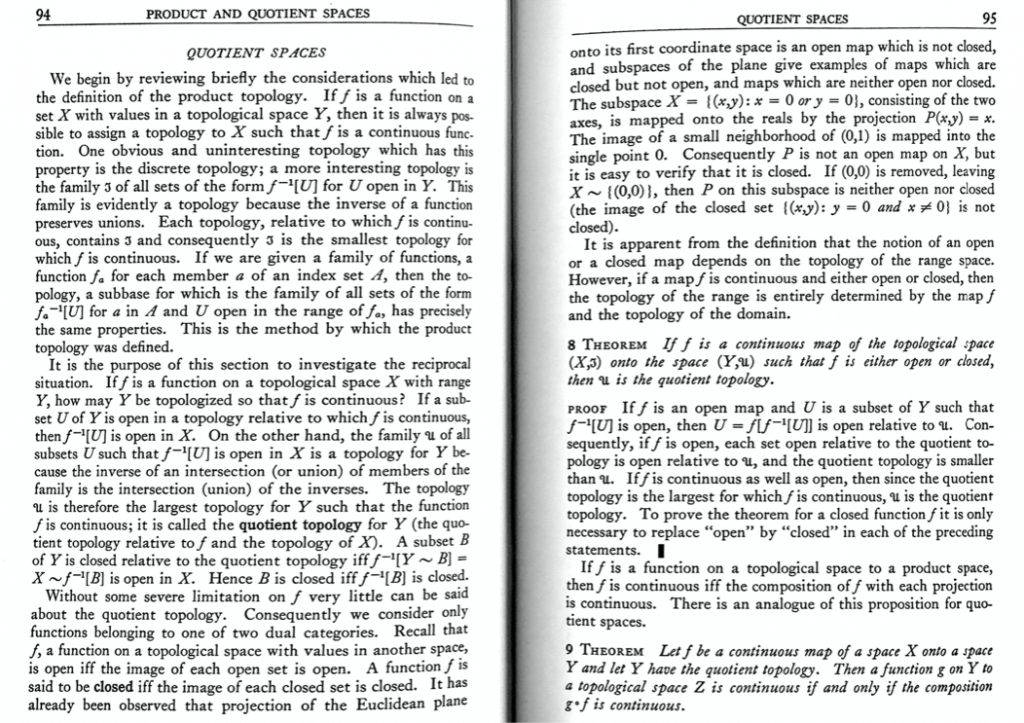
Let me compare some modern math for you. Here is a page from my favorite graduate level general topology textbook, General Topology by John L. Kelley:
John Kelley, General Topology, D. Van Nostrand 1955
I’m definitely not expecting you to read that one! (The page I showed is talking about “quotient spaces”, which is something that we will get to soon, relevant to the torus and to “Torus Games”.) Note that there are some symbols, but most of it is logical argument in prose. Moreover, the symbols are part of the prose; every equation is part of a sentence.
Here’s another example. This is from another classic graduate-level topology textbook. (Again, not expecting you to read it! Among other things, on this page the author is defining the torus and the Klein bottle as we have done in this class.)
Allen Hatcher, Algebraic Topology, Cambridge University Press, copyright 2001. Link here to free pdf of the whole thing!
I don’t want to oversell my point here: there are many areas of math which are about numbers and equations, and in which symbolism plays an important role. But even there, the equations are in the service of trying to understand the nature of things. And the tool for understanding the nature of things is logical argument.
I should also be clear that math is not about logical argument in quite the same way that, say, a political science paper is about logical argument. Although it is prose argument, math aims to talk about things which we can define very precisely, and make very certain arguments about. (More on that later in the class!)
What do mathematicians care about?
The Greeks probably considered Euclid’s postulates as self-evident truths about the world. In the nineteenth century, mathematicians developed new systems of geometry, with different assumptions than Euclid’s, which were nevertheless internally consistent, and beautiful. These systems were initially created in response to some unsolved questions from Euclid, but they soon took on a life of their own.
The attitude about postulates or axioms changed. (Note: I am taking “axiom” and “postulate” as synonyms; “axiom” is the more common modern word, but tradition has solidified “postulate” when we talk about Euclid.) People started to see the axioms as a set of assumptions which defined a mathematical system: a universe of thought. Different assumptions, different mathematical system. Different universe.
The relation of mathematics to the physical world was refined: a particular mathematical system could be taken as a model of the real world. Depending on what aspect of the real world you were trying to describe, one mathematical model or another might be more useful.
Euclidean geometry is an excellent mathematical model for the nature of lines, circles, and shapes made out of them, in the real world, provided we idealize the real world, (for example there are no true infinitely small points), and provided we keep the size of things small. When we get up to the size of solar systems and galaxies, for some purposes, a different geometry provides a better model.
(I said before that Euclid proves Pythagoras’ theorem, and that this establishes it as a logical necessity of how lengths in the real world work. That’s how the Greeks would have viewed it, but it’s not quite true. The way we would say it today is: if lengths in the real world obey Euclid’s postulates, then they must obey Pythagoras’ rule. Or more quantitatively, lengths in the real world obey Pythagoras’ rule to the extent that they obey Euclid’s postulates.)
That doesn’t invalidate Euclid though; Euclid is a perfectly good description of the nature of shapes in a particular mathematical universe, which Euclid defines through his postulates. As mathematicians, we can happily study the Euclidean universe. We still learn neat new things about it from time to time, and we use it when studying all kinds of other mathematical systems.
So why study different mathematical universes? Well, they may be useful for all kinds of things. But the more common reason is an aesthetic one. People are interested in unsolved problems in a given universe, like Euclid’s geometry. Mathematicians are often driven by unsolved puzzles. In the process, they are sometimes motivated to create new universes, which bend or modify the rules of the old ones. Then the question arises: how do things behave in this new universe? And, is this the only possible universe of this type? What are all the possible universes of a given type?
I would note also that mathematicians are often driven by aesthetic considerations. They want to understand why things behave as they do, they want to understand new universes, but they also want the explanations to be elegant, and the universes to be natural, interesting, and cool (all subjective judgments!).
A little more history
For a long time, one of the unsolved problems of math had to do with Euclid’s elements. Euclid has five postulates; four very simple looking ones, and one complicated looking one:
From Fitzpatrick’s edition of Euclid’s Elements, cited above.
This isn’t necessarily a real problem, but it really bothered some people. For a long time, people wanted to prove the fifth postulate (named the “Parallel Postulate”), assuming the other four postulates. (Or, perhaps, to assume some simpler looking postulate in addition to 1-4, and prove 5 from the new set of assumptions.)
It’s a long story, but here’s a short version: in the early nineteenth century, several people were trying to prove the fifth postulate by contradiction. That is: let’s suppose the fifth postulate was false. Then, let me derive conclusions from that. If I can derive a conclusion that is obviously wrong, then my starting assumption must be wrong. Ergo, since my assumption that the fifth postulate is false is wrong, then the fifth postulate must be true! This is also called a reductio ad absurdum argument.
What these people very gradually realized is that, instead of reaching a contradiction, they were deriving results that were crazy-looking, but all perfectly self-consistent. They were describing a new mathematical universe, with different assumptions, in which the fifth postulate was false!
(In the process, they ultimately showed that the quest to prove the fifth postulate was in fact doomed: you can’t prove postulate 5 from postulates 1-4, because there exists a self-consistent universe in which postulates 1-4 hold, and postulate 5 does not!)
This new geometry was called hyperbolic geometry, and we are going to be studying it soon.
(In retrospect, spherical geometry is also such a new universe! And people had been studying spherical geometry for a lot longer, since the Greeks. People didn’t see it that way at first, in part because, depending on how you interpret them, postulates 1-4 aren’t quite true for spherical geometry. In the process of figuring this stuff out, people had to reassess what they meant by a “geometry”, and they had to restate Euclid’s postulates and proofs in more precise way. We’ll be getting to this soon!)
What is this class about?
Over time, the line of inquiry I described above merged with some other lines of inquiry that were coming up in other parts of math at the same time. Together, they suggested that new interesting territory was opening up, and this opened up three questions:
What sort of localgeometries are possible? For example, in a neighborhood, 2D space could look like a section of the Euclidean plane, or it could look like a section of the surface of a sphere, or it could look like the neighborhood of a vertex of the cube, or, or,…. Hypothetical flat beings that lived in this universe could measure the curviness of their universe by, e.g., measuring angle sums of triangles, or measuring circumferences of circles. What are all the possibilities here? How can a space be curved? And what are the properties of triangles, circles, etc in such a space, analogous to Euclid?
What sort of global topologies are possible? On a cylinder, as we have seen, if you are in a small enough region, there is no way you could tell that your universe was not Euclidean. The local geometry is identical to that of Euclid. And yet, as a whole, the space is glued together differently. What are all the possible ways that a space could be glued together? How do shapes behave in such a space?
How are questions 1 and 2 related? They way that the sphere is curved locally seems to be tied to the fact that it curls up into a ball shape globally. Can we say more here? For example, can we say anything about the average local geometry of other ball-shaped spaces (like a polyhedron, or an egg, or a football)? Will they necessarily be different from the geometry of donut-shaped spaces, like the flat torus?
That’s what this course is about!
In particular, all of our discussion of spherical geometry at the beginning came under topic 1 above. I wanted to show you a geometry whose local properties were different from Euclid’s, and I wanted to derive some properties of it. Then, I started us looking at trigonometry, because that will allow us to understand the behavior of shapes on the sphere a lot better. There are still some very cool things about spherical geometry we still have to get to! The study of polyhedra also comes under topic 1: we were trying to figure out the local geometry of such spaces, e.g. how triangles and circles behave.
Right now, we are putting the sphere on hold, and pausing topic 1, in order to start investigating topic 2. The torus is one example of how space can be glued up to itself, in a global topological sense.
There isn’t a super clear dividing line between 1 and 2. We are studying the torus; but Weeks and I are insisting on studying the flat torus, which is prescribing a certain sort of local geometry on that torus. (If we picture the torus as the surface of a donut shape sitting in 3D, that is topologically correct, and helpful, but it is geometrically misleading, because the flat torus is not locally curved, whereas the donut shape is locally curved. More on that soon.)
My goal, since the reset, is to work seriously on topic 2 for a bit, and then link it back into topics 3 and 1.
What I want you to be doing in this class
My goal for this class is partly to take you on a tour of these ideas. But it is also partly for you to try to work through the ideas as mathematicians would. I want the class to be as authentic an experience as possible of doing mathematical research, as people have done it historically, and as people are continuing to do it today.
In mathematics, the word “research” means something different than it does in other subjects. It doesn’t mean looking up articles, although that can be part of it. It means this sort of exploration: creating new universes, figuring out how they behave, figuring out what universes are possible. Making conjectures about what is true, and then trying to prove the conjectures, or to find counterexamples.
That means that I am asking you to explore the ideas: how does this new universe behave? What are the properties of shapes in it? The new universe is going to allow things that weren’t an issue in Euclidean space; what should we allow in our definitions? Can we extend what we know to the weirder possibilities in some consistent way, or no?
I think that, 1) this process of doing mathematical discovery is fun and interesting, and should not be limited to only those few people who go through graduate school in math first; and 2) that, even if your goal is only to learn more basic mathematics, this is the best way to do it. Figuring things out yourself, and figuring out why they are true, gives you more fluency and understanding than just taking formulas from a book and applying them. (And getting in this habit makes you better at reading math: reading a math text becomes more of a collaboration between you and the book, rather than just accepting things passively.)
So that’s the reason behind the open endedness of many of the questions I’m asking. I’m not being ambiguous just to be annoying. I’m trying to ask: what questions are natural to ask here? What is interesting? What is a fruitful way of summarizing and organizing what we have figured out so far? I’m hoping that you will explore, and in particular that you will formulate your own questions, and try to answer them.
Writing solutions, and notebooks
This is also the reason behind my encouraging you to write more words, and to work in a diary format. You are writing a field notebook, for exploring new universes. It’s true that your initial rough work, as you are starting to explore new territory, will look like a crazy collection of drawings and scribbles and numbers. But it’s important to try to organize your thoughts, and to be clear about where you are trying to get to, what you’ve figured out so far, and what is holding you back.
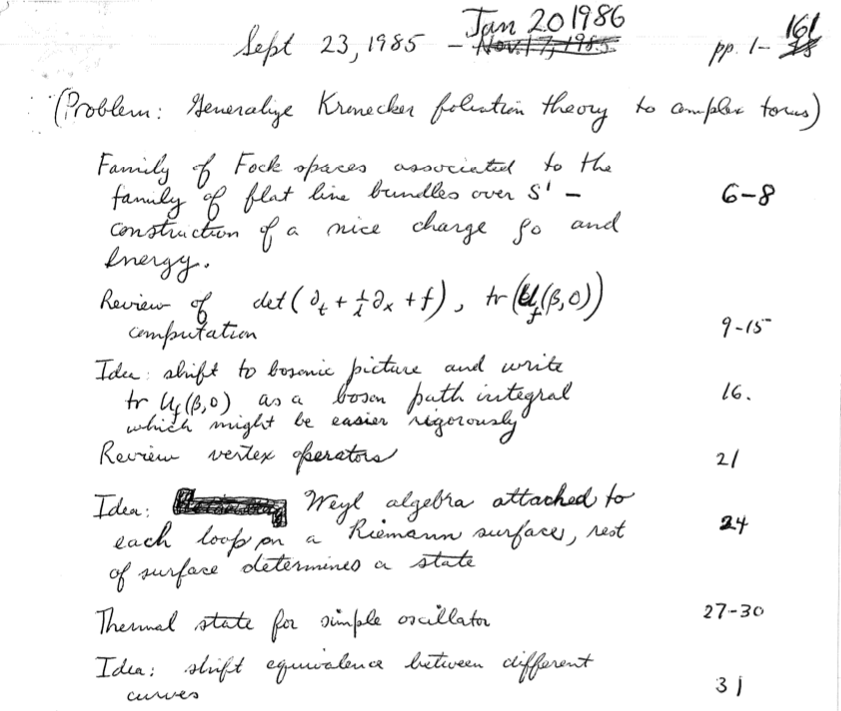
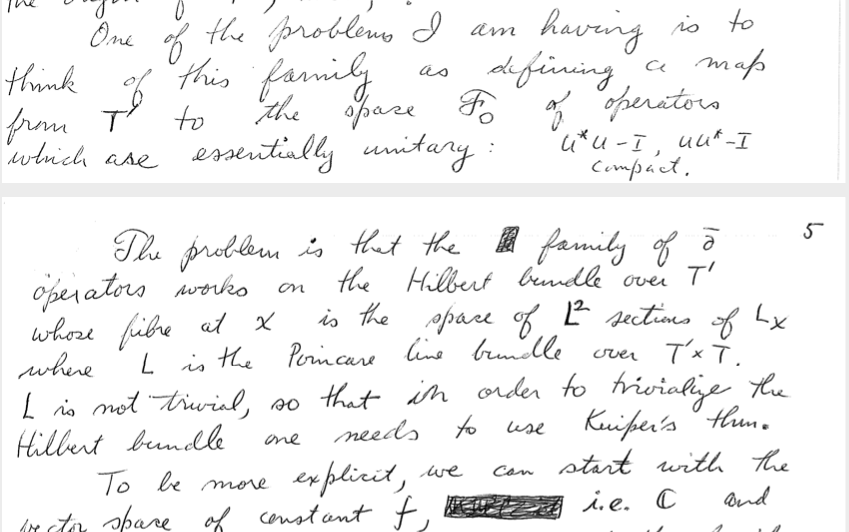
Let me show you an example. Here are a few excerpts of pages of personal notebooks from a mathematician, Dan Quillen. The math words aren’t going to make any sense to you, but I’d like you to note the style. First, he has made an index page at the front of each book (which is filled in as he works in the book):
Some things are labelled “ideas”, that he wants to follow up. Other things are reviews, reminding himself of what he knows (or is learning).
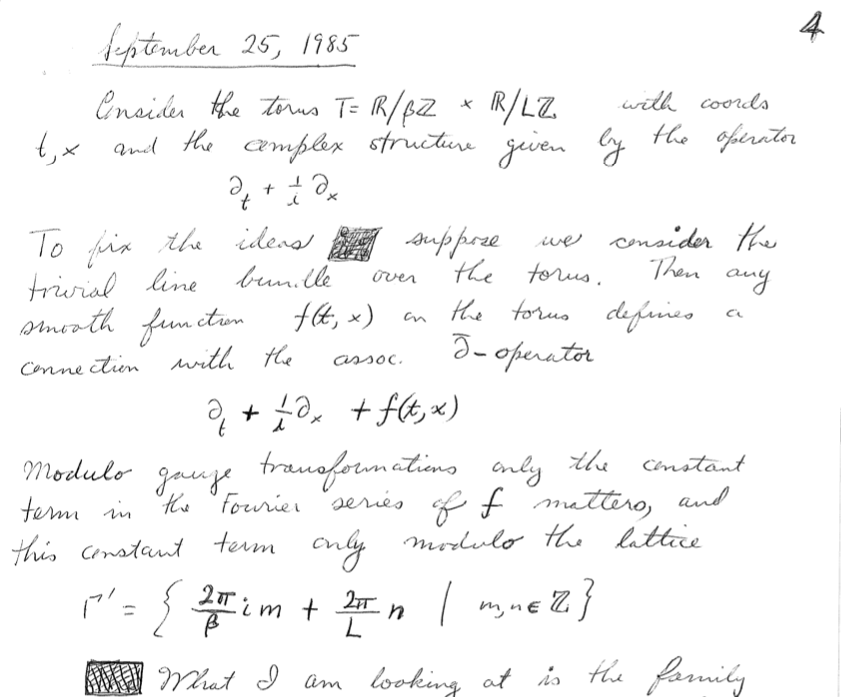
When he starts thinking about something, he sets up what he wants to do:
Note that there are symbols, but the symbols are always parts of sentences.
He talks about where he is getting stuck, and tries to explain to himself why:
He’s making plans, and making guesses about what he hopes might be true, sometimes in a vague sense:
“Somehow I feel that there might be a link…” “And it would be especially nice if…”
You can find scans of all of Quillen’s notebooks (!) here.
Full disclosure: not all of us keep notebooks this carefully! But I know that when I do, I make better progress. And that when I don’t, I often come to regret it, when I’m trying to decode my weird scribbles later on.
Collaboration
Another important element of this authentic experience of mathematical research and exploration is collaboration. While there are some mathematicians who work alone, and while some work is always done on one’s own, it is more and more the case that most mathematical work is done collaboratively with others.
This has the advantage that your collaborator’s strengths may be your weaknesses, and vice-versa. It is helpful to try to explain your thoughts to another person. It is helpful to listen to another person’s thinking and to try to make sense of it. When you are feeling stuck and lost, it’s easier to keep going when someone else is stuck and lost with you. And it’s often more fun!
Especially in this moment, when we are all separated and communicating virtually, I think this process of talking to each other and working together is important. I would therefore strongly encourage you to try to find people you like to work with. Talk to me and to Sophia, but also talk to each other. Talk in Slack in the open channels, and then direct message someone if you want to have a one-on-one conversation. Think of someone you liked working with in class, and DM them on Slack. Either text through Slack, or make a call (which you can also do on Slack, just click on the person’s name). Put your profile picture up on Slack, so that someone who remembers working with you from class, but who doesn’t recall your name, can find you.
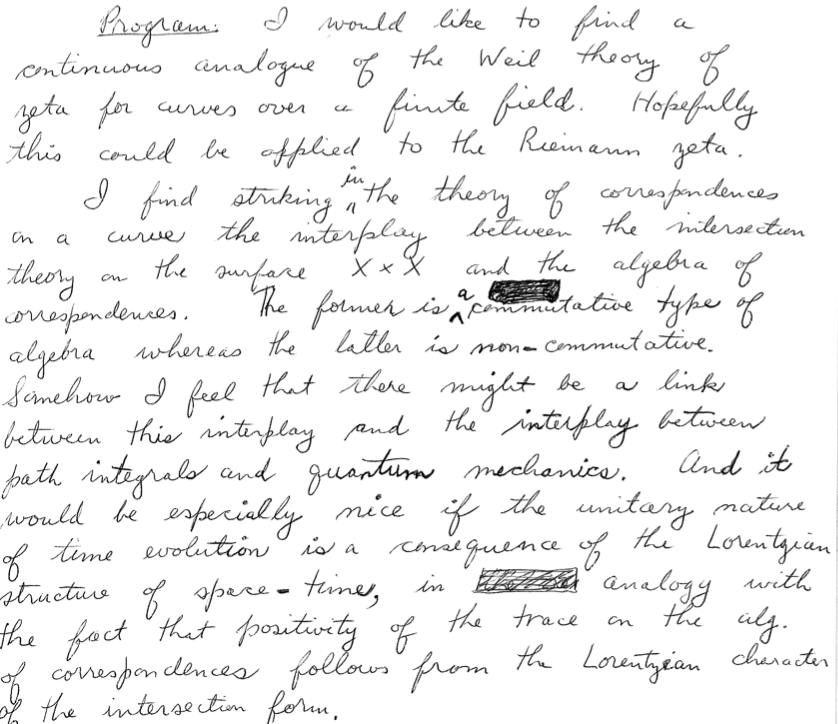
To give you an idea of what collaboration among math professionals is like, I’d like you to read the article I have linked below. Coincidentally, it also happens to be about the subject of our course! The type of topology that the people described in the article are doing is an outgrowth of what is in Shape of Space. (There was a mathematician working in the 1970s, Bill Thurston, who brought in a lot of new ideas. Jeffrey Weeks, the author of Shape of Space, was his student; many of the people described in the article are either Thurston’s students, or students of his students, or students of students of students. I’ll say more about this later!)
Click on the image to go to the article!
What next?
Well, that was all more than I had started out intending to say! In the next lectures, I’ll get back to the specifics of the torus and the cylinder, make some hints for the problems, talk about intrinsic vs. extrinsic geometry, and introduce the Möbius strip and Klein bottle.
This is a little bit out of the sequence of lectures, so I am numbering it as a “supplementary” lecture. I’ll probably continue doing this when I need to make side points.
On Problem Set 5, I noticed that many people had remembered, or looked up, formulas to convert from radians to degrees, or formulas for arc length. Although this gives correct answers, I think it is very important to understand that this is unnecessary! All those things can be worked out by proportions.
One of the main things I want to get across in this class, is that you don’t have to memorize formulas, or take things on authority. You can figure them out yourself. And moreover, figuring them out yourself is often easier, and gives you a better understanding.
If you were already doing these problems by proportions, you can skip this section; though it might be good to skim through it and see if there is anything new to you. However, if you had used formulas for converting degrees to radians or finding arc lengths, I would like you to work through this section and do the problems. This is an important thing to work out.
I also make some comments about how to algebraically deal with fractions in this lecture; you should take a look and see if this is helpful.
What you DO need to memorize
OK, let’s get started. There is one formula you need to know: that the circumference of a circle C (the distance around its edge) is related to its radius r (the distance from the center to any point on the edge) by
.
(ASIDE: Where does this formula come from? Well, it contains two things. One, it is implicitly asserting that the ratio of the circumference of a circle to its radius, the ratio C/r, is the same for any circle. That part is actual math. The other part of this formula is a convention; assuming that this ratio is in fact constant, we are naming that constant, . In other words, that defines what we mean by . Why the 2? Well, historically, people tended to work with the diameter rather than the radius, so they wrote this formula , or equivalently .)
There are also two conventions you need to know: the angle all the way around, coming full circle, is by convention 360 degrees (for historical reasons), or radians (for math reasons we will see as we go on).
Converting between degrees and radians
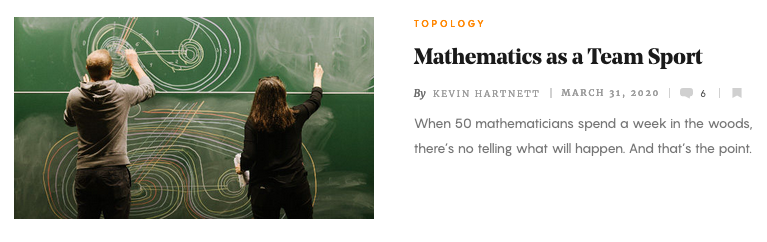
You do not need a conversion formula between degrees and radians. You can figure it out by proportions. Let’s say we have some angle . I can measure that angle in degrees, or in radians. I’m going to distinguish these two different numbers by writing them and respectively.
The proportion is of a full rotation shouldn’t matter how we measure it! That is:
What proportion angle a is of a full rotation should be the same either way!
Written in a more condensed way, this says
.
Now, let’s say you know in degrees, and you want to find in radians. So you need to solve for . I’m going to walk you through this in a long-winded way, in case you don’t remember algebra well. Even if you do, I think the method I suggest to think about fractions can be useful.
What I suggest for fractions is this: instead of being a division, think of every fraction as being a multiplication by a reciprocal. This is what we do in advanced math, and it’s helpful even for simple algebra problems. (The underlying reason is that division is a terrible operation, just awful. For example, it is NOT true that is equal to (try it!).)
So, I’ll write the formula above as
,
because, remember, that you multiply fractions by multiplying the tops and bottoms. Dividing a number by 1 doesn’t change it, so we can write this more simply as
.
When I see a formula like , I automatically read it as (which is standard in advanced math).
OK, now that makes it clear how to solve for : I have to multiply both sides by :
,
so
.
(Remember what I said about fractions; I could convert . More simply, I just read automatically as meaning , basically by definition.
(If you have done “cross-multiplying” in the past, please forget about it. It’s technically correct, but it is confusing, and it is NEVER necessary. All algebra consists of doing the same thing to both sides of an equation.)
Now, we can simplify the fraction as follows:
.
So, the formula above can be written more simply as
.
This is the formula you may have found for converting degrees to radians. I wouldn’t suggest memorizing this formula—I haven’t. Instead, it is easier and more instructive to go back to the proportions every time.
Note that I have done the algebra in a ton of detail above. I have done this so that, if you are rusty on algebra, you can follow through the steps carefully. If you are rusty on algebra, I would recommend that you do many explicit steps, like I have above, until it starts to feel boring. But once you are comfortable, you can skip all these steps, and jump straight from to .
Problem 1: Suppose that you know an angle in radians, and you want to convert it to degrees. Follow similar steps as above, to solve for in terms of .
Problem 2: Convert radians to degrees. Don’t use the formula you worked out; instead, go back to the proportions and work it out from there. (Hint: You’ll get a fraction over a fraction at first. But rewriting the big fraction in the way I recommended will eliminate this potential problem.)
Problem 3: Convert 120 degrees to radians. Don’t use the formula I worked out above; instead, go back to proportions and work it out from there.
Finding arc lengths on a circle
Now, let’s suppose that I know an angle , which I have placed at the center of a circle, of known radius r. I want to figure out the length s of the arc of the circle that is cut out by this angle. I gave a formula in class, and some of you looked up a formula, but this is not necessary. You can, and should, work it out by proportions.
Let me assume that the angle is given in radians. (I’ll ask you how to work this out if the angle is in degrees, in the problems.)
The proportion that the angle makes of a full rotation, should be the same as the proportion that the arc length s makes of the length all the way around, i.e. of the circumference:
Written more compactly, this says
,
which simplifies to
.
Problem 4: Fill in the details of simplifying to .
Problem 5: Suppose we know that an angle cuts out a length of 6 on a circle of radius 2. Find the angle in radians.
Problem 6: What I did above means that, if you know the radius r of the circle, and the arc length sof a piece of a circle, you can calculate the corresponding angle in radians. Suppose instead that I know the angle and radius, and I want to find the arc length. How do you have to rearrange the formula? Do so.
Problem 7: a. Suppose that we have a circle of radius 5, and suppose we draw an angle at the center of size 1 radian. How long of an arc does that angle cut out on the circle? b. Same question, but change the angle to size radians.
Problem 8: a. Repeat what I did above, but assume now that the angle is given in degrees rather than radians. Find a formula that relates the angle , given in degrees, to the arc length s and radius of the circle r. Simplify as much as you can. b. Compare the formula that you just got for in degrees to the equivalent one we got for in radians. Which looks nicer? This should hopefully give you an initial sense of why radians will work out more simply than degrees. (There will be more important simplifications from working in radians as we move on. Of course, we can always convert any formula involving radians into an uglier one involving degrees if we need to.)
What about other polyhedra, beyond the cube? What is geometry like there?
The Regular Tetrahedron
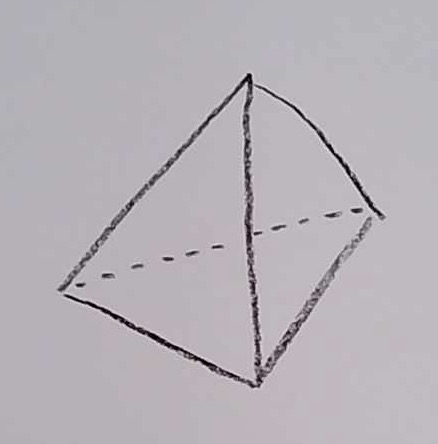
The surface of this polyhedron consists of 4 equilateral triangles. There are 3 triangles meeting at each vertex, and a total of 4 vertices.
A regular tetrahedron. (Not drawn all that well! Every face is supposed to be an equilateral triangle.)
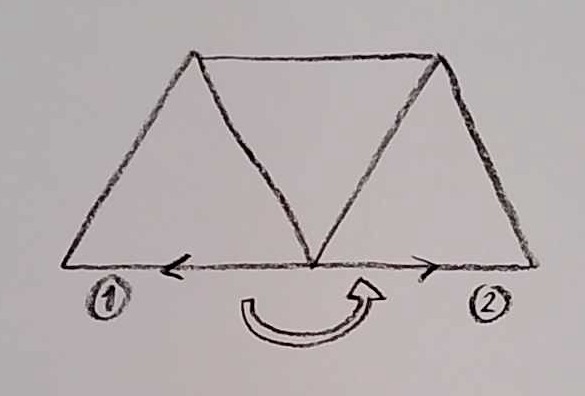
You can make a model of a vertex by taking three equilateral triangle, and gluing them together as follows:
Glue Edge 1 to Edge 2, with the directions indicated, to make one vertex of a regular tetrahedron.
I would recommend that you do this with paper, scissors, and tape. (Light cardboard can make an even better model.)
(For the moment, I am only concerned with the regular tetrahedron, so I will sometimes just say “tetrahedron” for short, and you should take that to mean “regular tetrahedron”. It would be “irregular” if it had four triangular faces arranged as above, but if the faces weren’t all equilateral, and/or if the vertices did not look the same. I won’t worry about “irregular” tetrahedra right now. The same point goes for the other polyhedra described below: assume regular, unless specified otherwise.)
Problem 1: Suppose we pick a point A in the triangular face on the left of the diagram above, and we start drawing a line which hits Edge 1 at point P. This line will reappear at a point Q on Edge 2. Give rules for where the line will appear, and at what angle it will be going (similar to what we did for the cube).
Problem 2: Draw a triangle on the regular tetrahedron that contains one vertex (by drawing it on the flattened model as shown above). Try to pick the simplest triangle you can. What does it look like on the three-dimensional tetrahedron? What is its internal angle sum?
Problem 3: Find the internal angle sum for any triangle which contains one vertex. (Give an argument like one of the ones I gave for triangles on the cube.)
Problem 4: Suppose we draw a circle in Tetrahedronworld, whose radius is r, and whose center is on a vertex. What does it look like? What is the formula for its circumference? (Assume that r is less than the distance to the next vertex, otherwise things get quite complicated.)
The Octahedron
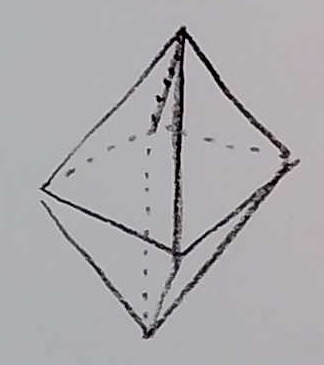
The surface of this polyhedron consists of 8 equilateral triangles, with 4 triangular faces meeting at each vertex. There is a total of 6 vertices.
A regular octahedron. Every face is supposed to be an equilateral triangle.
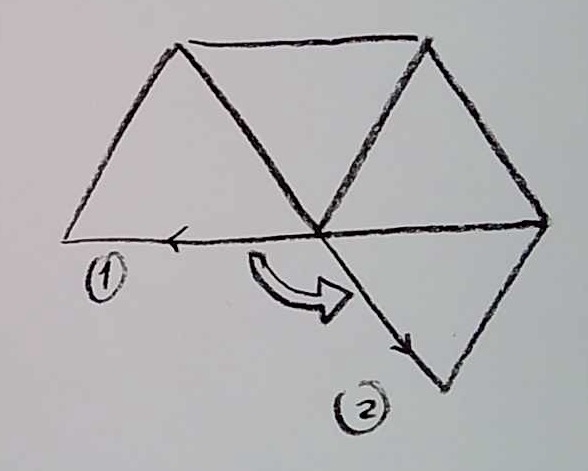
You could also think of this as two square-based pyramids, glued together at their bases, and then erasing the bases in the middle. You can make a model of one vertex of the regular octahedron by drawing four equilateral triangles, and gluing together as follows:
Glue Edge 1 to Edge 2, with the directions indicated, to make one vertex of a regular octahedron.
I would recommend you make a model for yourself, with paper, scissors, and tape.
Problem 5: This is actually multiple problems. I would like you to do all the same problems you did for the regular tetrahedron, again for the regular octahedron. That is: – Give the rule for a line leaving Edge 1 and appearing from Edge 2 – Draw a simple triangle containing one vertex, and find its angle sum – Prove that any triangle containing one vertex has that same angle sum – Draw a circle, and give the formula for its circumference You can be a bit less detailed this time; you can concentrate just on the features that are different between the regular tetrahedron and the regular octahedron.
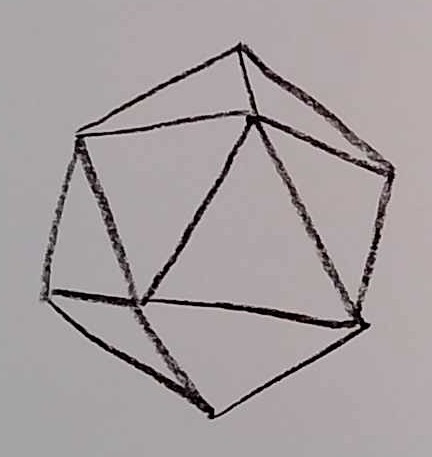
The Regular Icosahedron
The regular icosahedron has a surface consisting of 20 equilateral triangles, with 5 triangles meeting at each vertex. There is a total of 12 vertices.
OK, OK, an icosahedron is hard to draw. I could put a professional or computer-drawn image here, but instead I’m going to refer you to the Euler’s Gem text.
Problem 6: Make a model of a vertex of a regular icosahedron. Answer all the questions for the regular icosahedron that you did for the tetrahedron and octahedron above. (So this question is also multiple problems.)
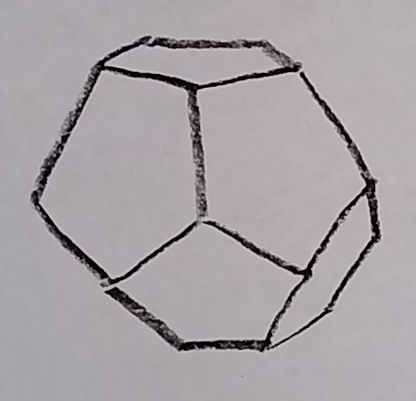
The Regular Dodecahedron
This polyhedron has 12 faces, each of which is a regular pentagon (5-sided polygon). There are 3 pentagons meeting at each vertex. There is a total of 20 vertices.
Aw geez. Well, I tried my best. As before, you can see a better image in Euler’s Gem. You can also find rotatable 3D models online.
Problem 7: Exactly like Problem 6, except for the dodecahedron.
The Platonic Solids
Let’s call a polyhedron regular if:
every face is a regular polygon;
every face is congruent; and
a neighborhood of every vertex is congruent.
That last condition means that, for example, if one vertex has four triangles meeting there, then every vertex should have four triangles meeting there, and moreover, if I took a little region around the first vertex, I could exactly overlay it over the same region on the second vertex. (This definition isn’t totally sharp, but we can make it better later.)
It is a remarkable fact that there are only five regular polyhedra possible! These are called the Platonic Solids.
Problem 8: Try to think of a reason why the regular polyhedra we have listed above are the only ones possible. (It may help to classify them by type. For example, you can try to explain first why no other triangle-faced regular polyhedra are possible.)
There are many more polyhedra out there, though. If we pick a less restrictive class than “regular”, then we can give more examples. For example, we could still ask that every vertex looks the same, and that every face be a regular polygon, but we could drop the condition that all faces are congruent. So, for example, you could have a polyhedron whose faces are a mix of equilateral triangles and squares. A polyhedron satisfying these conditions is called an Archimedean solid.
Problem 9: Try to come up with an example of an Archimedean solid (which is not a Platonic solid). (If you are feeling ambitious, you can try to come up with as many examples as possible. You could even hazard a guess at how many Archimedean solids there are in total.)
In a previous problem set, I asked you what the possible interior angle sums are for triangles in Cubeworld. What is the minimum? What is the maximum?
It seems pretty likely that the minimum is 180 degrees. If a triangle stays on one face, then Cubeworld is exactly Euclidean there. We don’t know how to prove this yet, but it seems pretty solid.
What do the edges do?
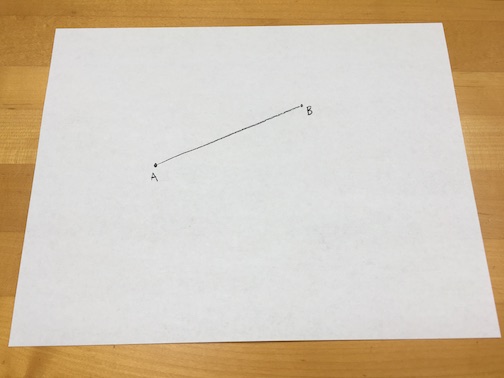
Note that the edges don’t actually change the geometry at all. One way to see this is to note that folding a piece of paper does not change any distances measured on the surface of the paper, because paper is not stretchy. So if I draw a straight line–path of shortest distance–from point A to point B on a flat piece of paper:
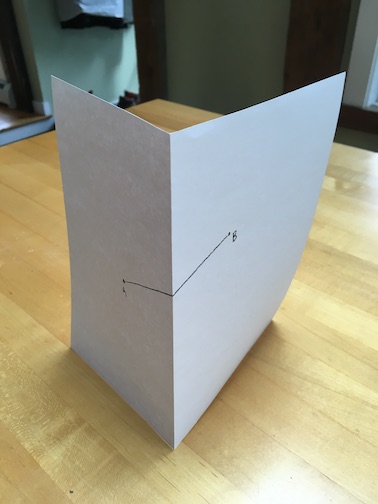
and then I fold the paper, to make an edge of the cube:
then that path from A to B continues to be a path of shortest distance, since I have not changed any distances. Therefore, I can go back and forth between Euclidean world and “edgeworld” with impunity. The technical name is that there is an “isometry” between the two pictures.
Optional Problem 1: If you find the argument above convincing, you can skip this problem. However, if you find this argument unsatisfying, you can make a more solid argument as follows. Think of the edge as being two flat squares, with a gluing rule: when you leave edge 1, you come out at edge 2 at the same height.
Edge 1 is glued to edge 2.
The gluing is done so that point P is glued to point Q, where P and Q are the same height from the bottom of the square.
Now, if I have a point A on Face 1, and a point B on Face 2, a Cubeworld straight line between them goes from point A to a point P on Edge 1, which comes out at point Q on Edge 2 and travels to point B. The straight line has to be an ordinary straight line segment on each face (since each face is Euclidean: convince yourself of this!). So the question is, where should point P and Q be, so that the distance AP plus QB is least? Figure out what that placement of P and Q should be, and prove it.
So which triangles have angle sums of 180 degrees?
A triangle that doesn’t contain any vertices can be completely flattened out to a Euclidean one, even if it crosses multiple faces:
This triangle in Cubeworld will have a 180 degree internal angle sum.
And then it will have a 180 degree angle sum, because it’s a regular Euclidean triangle!
Triangles containing one vertex
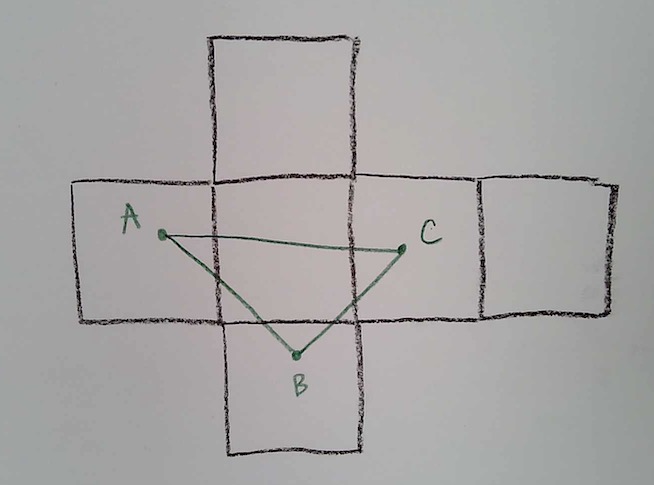
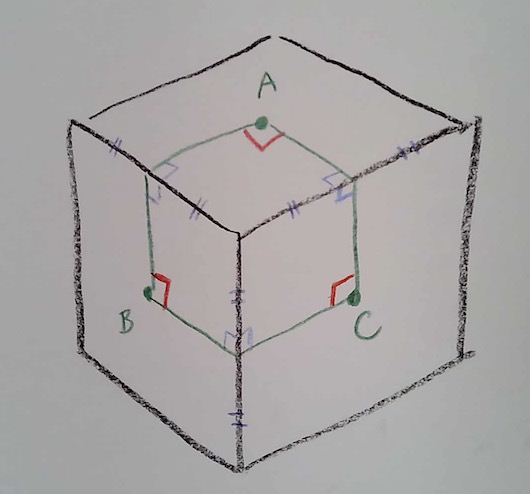
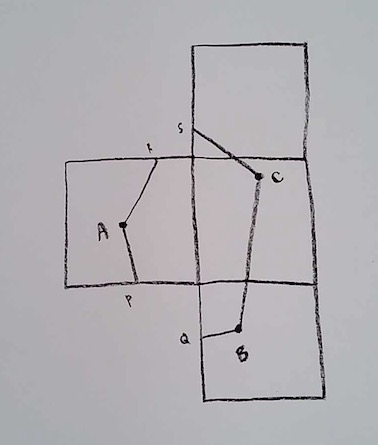
So now, what if a triangle includes one vertex in its interior? You gave examples in class where the angle sum is 270 degrees, e.g.:
A Cubeoworld triangle. Angles at vertices A, B, and C are each 90 degrees. (This is supposed to be a three-dimensional picture, in perspective.)
Is it always true that a triangle containing one vertex will have a 270 degree angle sum? Many of you were suspecting this, and a few of you gave an argument for it. Let me run through a way of establishing this fairly concretely, which will also be helpful for other Cubeworld questions.
Lines crossing edges again (in more detail)
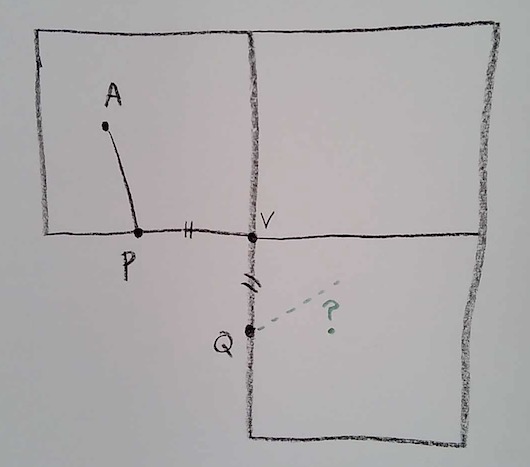
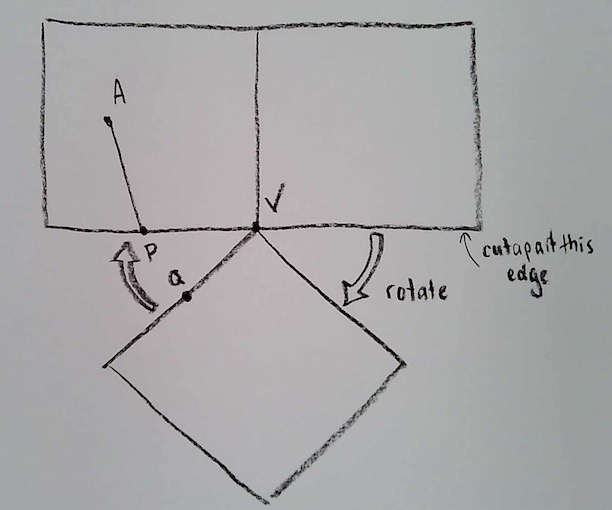
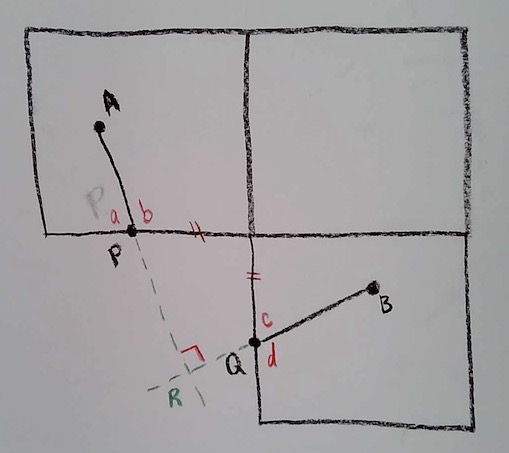
First, let’s revisit the question of how lines cross edges. Let’s figure out how to draw them in the flattened picture. So, we have a flattened picture of the cube around one vertex V of the cube; let’s just draw the three faces of the cube that meet at that vertex. We have a point A on one face, and a line that leaves A, crosses an edge at point P, and comes out again at point Q on another face. (Points P and Q are the same point when the cube is glued together.)
Line segment AP will continue from Q; which way will it go?
To answer this, let’s imagine the point V as a hinge, and let’s swing that bottom face over, so that P and Q meet. In this way, I’m accomplishing the gluing of the edges to make the cube (but I’m cutting another edge).
Cut apart the edge on the right side, and rotate the bottom square, hinged at V, so we can glue the edge on the left side, making P and Q meet.
Now that the two sides are glued, so that P and Q meet, it is clear how a straight line should go: the angles should satisfy a=c and b=d.
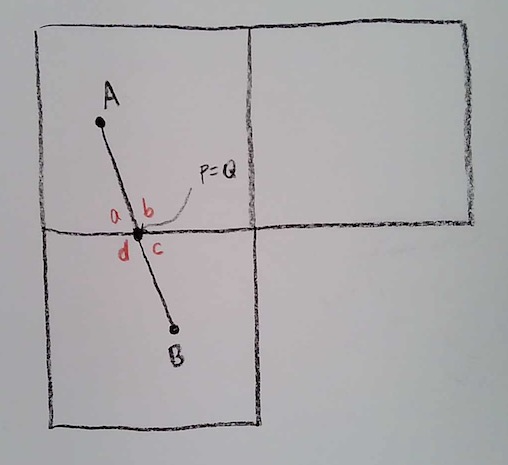
Now that P and Q coincide, we can see that the angles should satisfy a=c and b=d. This tells us what direction the line segment should leave the point Q at as it travels to B.
Now, rotate the bottom face back to its original position, and we get a rule–which looks much less obvious now!–about how the line segment AP should be continued when it comes out at Q:
To continue a straight line segment over an edge, you must make angles a=c and b=d.
Triangles containing one vertex, continued
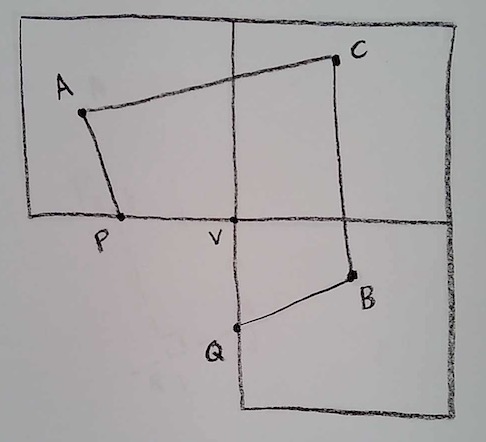
Ok, now back to a triangle containing one vertex. Let’s take the picture we just drew, and add a third point C, so that ABC is a Cubeworld triangle.
A Cubeworld triangle ABC containing one vertex.
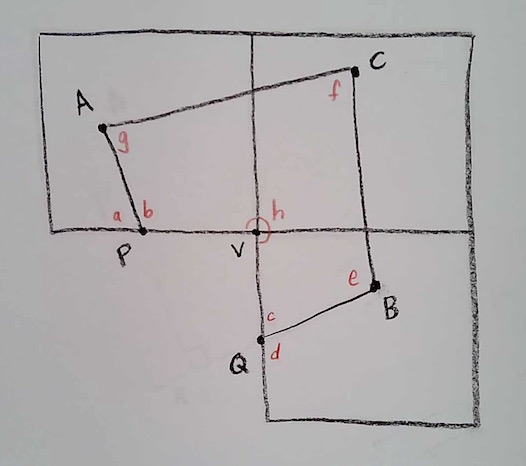
Now, let’s label every angle in sight:
A Cubeworld triangle, containing one vertex, with angles labeled. Note that the internal angle sum of ABC is e+f+g.
The internal angle sum of Cubeworld triangle ABC is e+f+g. We would like to argue that e+f+g is 270 degrees, no matter where we place A, B, and C (provided that the interior of ABC contains vertex V).
Now, notice that we have created an ordinary euclidean 6-gon APVQBC:
APVQBC is an ordinary Euclidean 6-gon, whose internal angle sum is 720 degrees.
A Euclidean polygon with 6 sides will have an interior angle sum of 720 degrees. I’ll leave it to you to explain why:
Problem 1: Explain why a Euclidean 6-gon will have an internal angle sum of 180 x 4 = 720 degrees.
This means that
e + f + g + b + h + c = 720 degrees.
But now what do we know? We know that h = 270 degrees:
e + f + g + b + 270 + c = 720, so e + f + g + b + c = 720 – 270, so e + f + g + b + c = 450 degrees.
We also know that c = a, so we can substitute a for c in our equation:
so e + f + g + b + a = 450 degrees.
But now look at what has happened! We know that b + a = 180 degrees!
e + f + g + 180 = 450 e + f + g = 450 – 180 e + f + g = 270 degrees!
We didn’t assume anything about the placement of A, B, and C, except that V was contained in the interior. So we know that:
Any Cubeworld triangle not containing a vertex in its interior has an interior angle sum of 180 degrees
Any Cubeworld triangle containing one vertex in its interior has an interior angle sum of 270 degrees
Another method
Before we move on, I’d like to show another way of solving this problem, that perhaps some of you would like better.
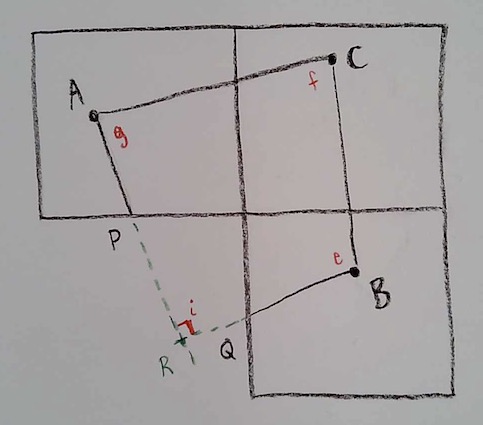
Let’s say we continue the line segment AP beyond P, into the region which doesn’t correspond to any cube face. Let’s do the same for the line segment BQ. Then, the extended AP and BQ will meet at a new point R (which is not on the cube at all, but is on our flat paper):
Note that the point R does not correspond to any point on the cube; it is only a point on our flat paper diagram.
Now, by the process described above, when P and Q were meeting, we then took the bottom square and rotated it 90 degrees, to put it back in its original position. Consequently, we have rotated the line BQ by 90 degrees. Before the rotation, BQ and AP lined up; therefore, after the rotation, the extended lines from AP and from BQ ought to be at 90 degrees to each other.
Problem 2: Use this new point R to give an easier proof that e + f + g = 270 degrees.
Triangles containing two vertices
Problem 3: Find a Cubeworld triangle that contains two vertices in its interior, if you haven’t already. Try to make it as simple as possible. Find the sum of the interior angles. Does this seem to make sense with what you know already?
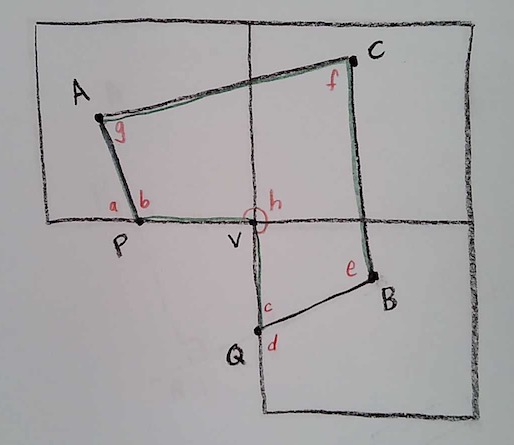
Problem 4: Find the angle sum for any Cubeworld triangle that contains two vertices in its interior, if you haven’t already. Make an explanation (proof!) similar to one of the ones I gave for a triangle containing one vertex earlier in this lecture. Your diagram should look something like this:
Triangle ABC contains two vertices of the cube. When the cube is assembled, points P and Q coincide, and points R and S coincide.
My plan is to write up my planned lectures here. I may also link videos, if I have time to make them!
Please ask questions, or have general discussions with each other, in
the comments sections. We can also do that on our Slack workspace.
Let’s see what ends up working best.





 .
.


 for the sides of a right triangle), more than a thousand years before Pythagoras; but we don’t have any record from them of why it is true. This is an empirical property of physical lines in space; Euclid shows that, based on a few fundamental assumptions, that it is a logical necessity. (Incidentally, Euclid manages to say Pythagoras’ theorem without numbers or measurement too!)
for the sides of a right triangle), more than a thousand years before Pythagoras; but we don’t have any record from them of why it is true. This is an empirical property of physical lines in space; Euclid shows that, based on a few fundamental assumptions, that it is a logical necessity. (Incidentally, Euclid manages to say Pythagoras’ theorem without numbers or measurement too!)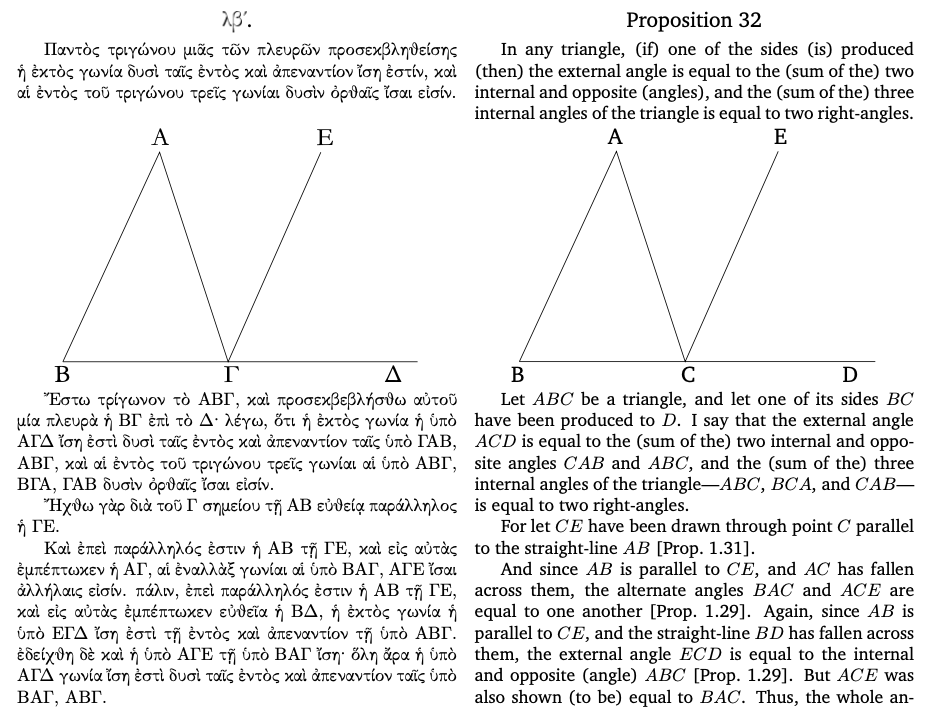


 .
. . In other words, that defines what we mean by
. In other words, that defines what we mean by  . Why the 2? Well, historically, people tended to work with the diameter rather than the radius, so they wrote this formula
. Why the 2? Well, historically, people tended to work with the diameter rather than the radius, so they wrote this formula  , or equivalently
, or equivalently  .)
.) radians (for math reasons we will see as we go on).
radians (for math reasons we will see as we go on). . I can measure that angle in degrees, or in radians. I’m going to distinguish these two different numbers by writing them
. I can measure that angle in degrees, or in radians. I’m going to distinguish these two different numbers by writing them  and
and  respectively.
respectively.
 .
. is equal to
is equal to  (try it!).)
(try it!).) ,
, .
. , I automatically read it as
, I automatically read it as  (which is standard in advanced math).
(which is standard in advanced math). ,
, .
. . More simply, I just read
. More simply, I just read  automatically as meaning
automatically as meaning  , basically by definition.
, basically by definition. .
. .
. in terms of
in terms of  .
. radians to degrees. Don’t use the formula you worked out; instead, go back to the proportions and work it out from there. (Hint: You’ll get a fraction over a fraction at first. But rewriting the big fraction in the way I recommended will eliminate this potential problem.)
radians to degrees. Don’t use the formula you worked out; instead, go back to the proportions and work it out from there. (Hint: You’ll get a fraction over a fraction at first. But rewriting the big fraction in the way I recommended will eliminate this potential problem.)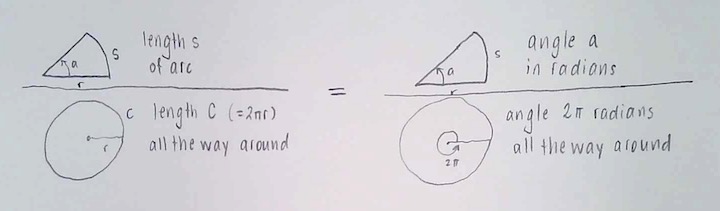
 ,
, .
. .
. radians.
radians.